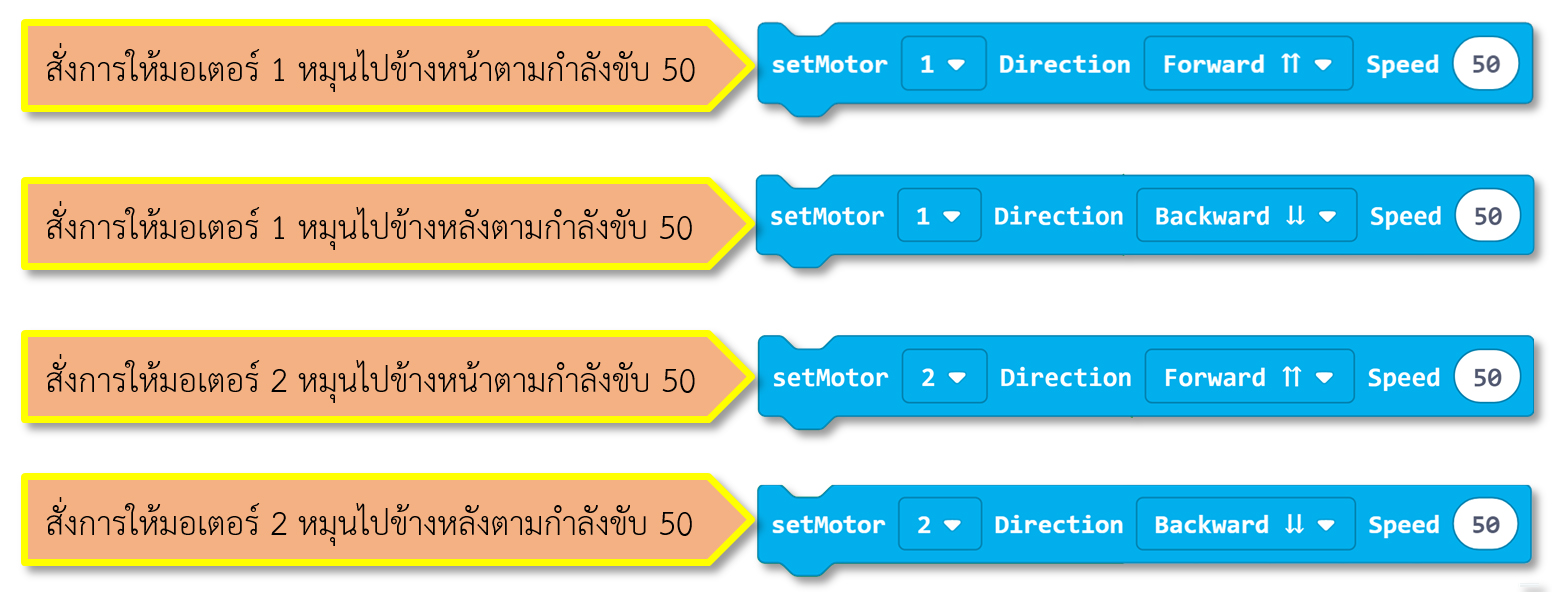
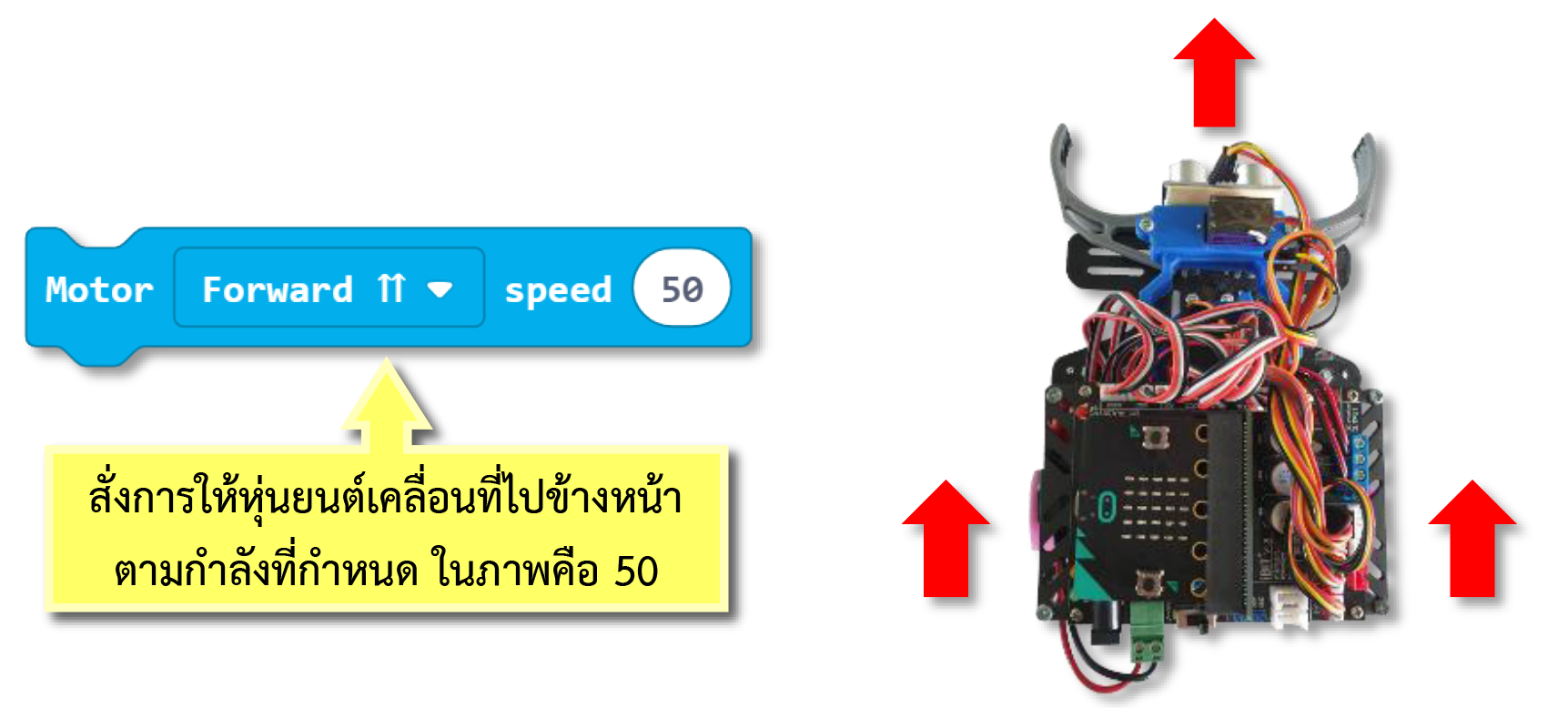
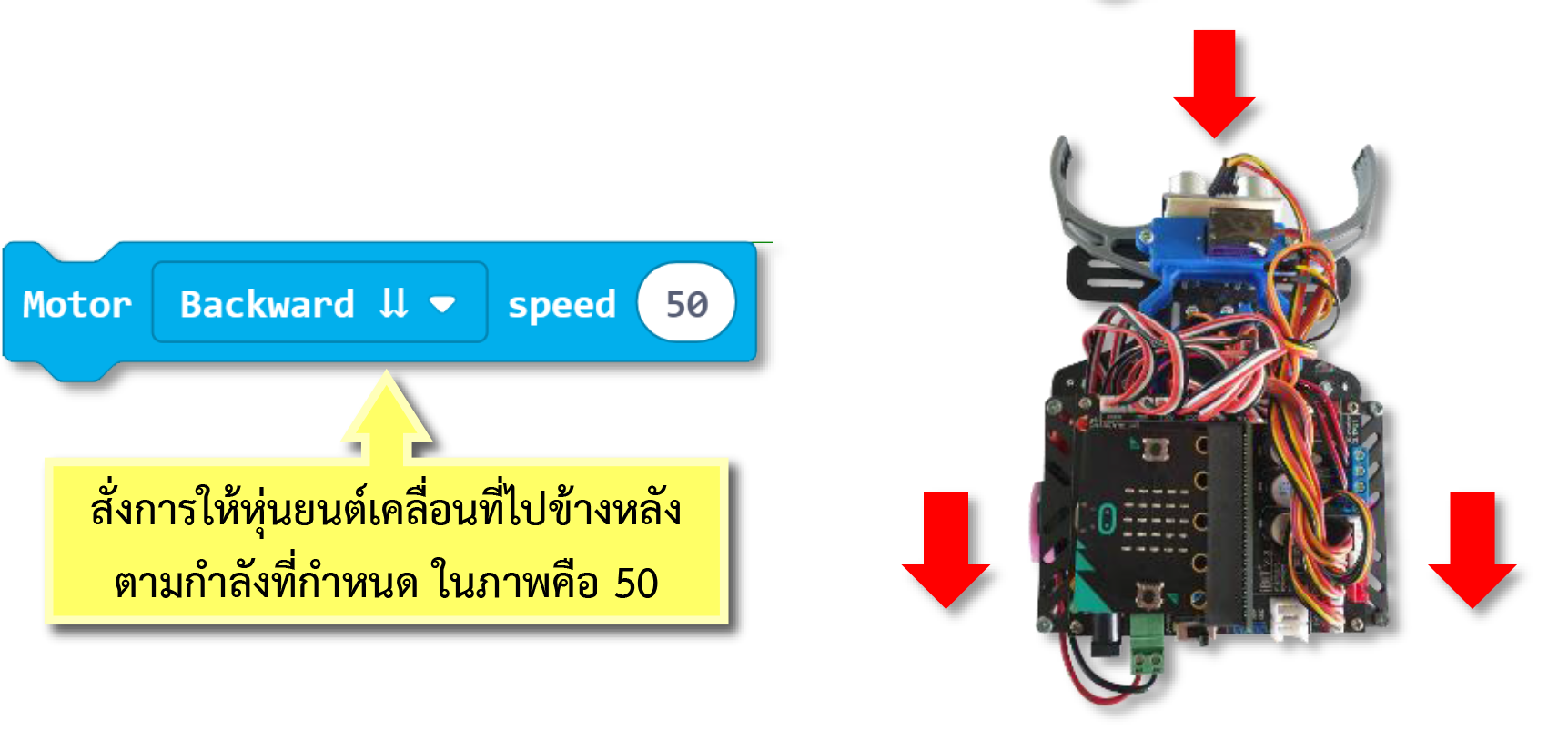
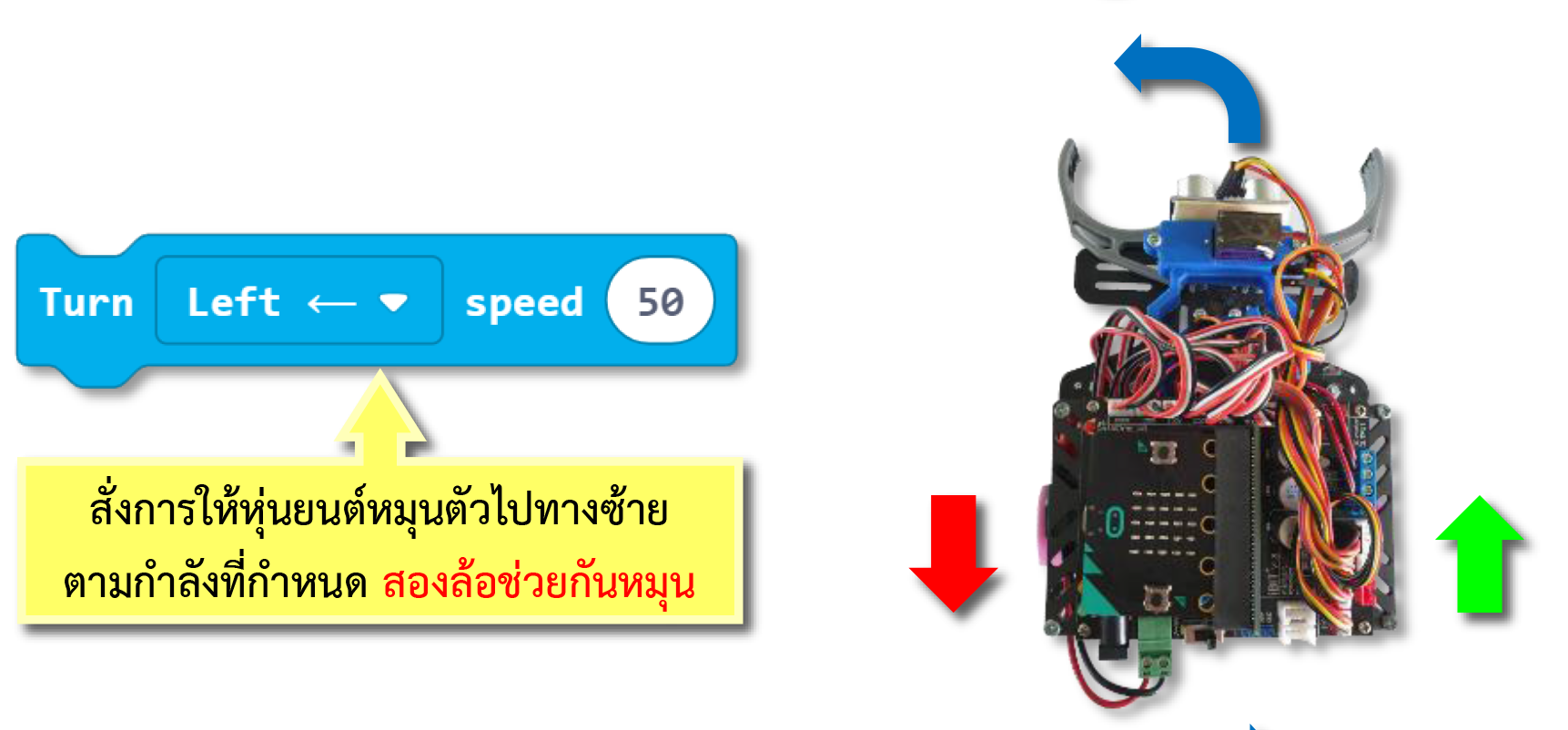
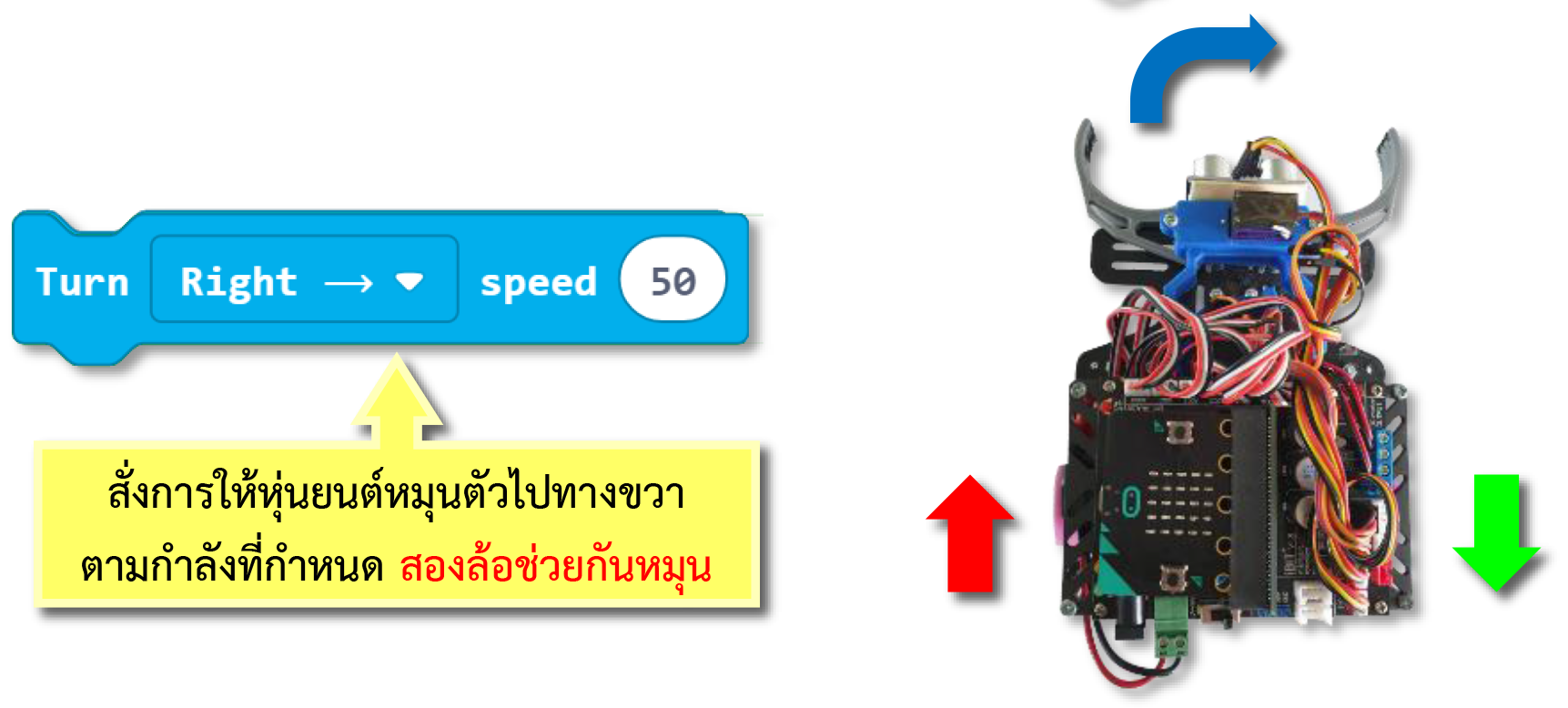
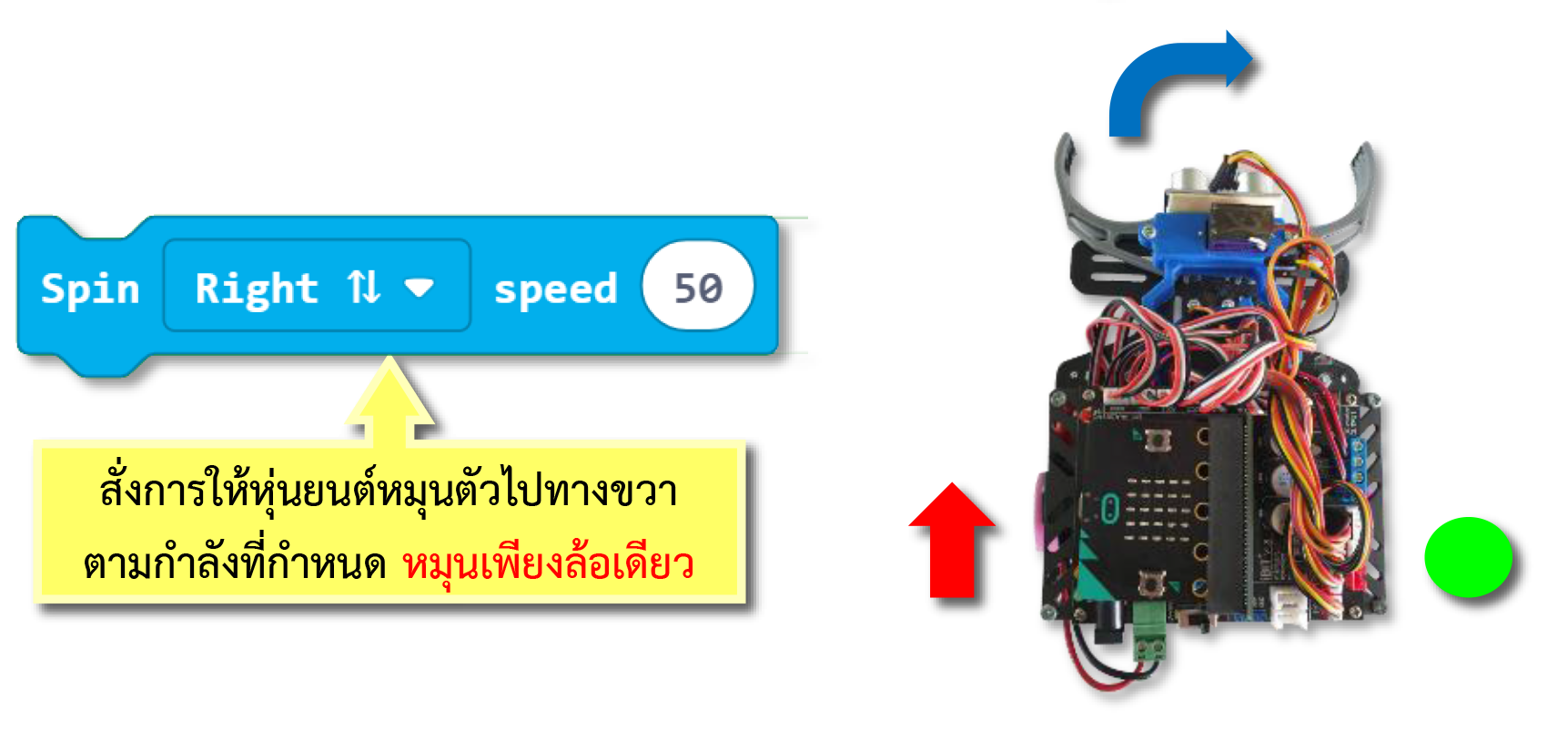
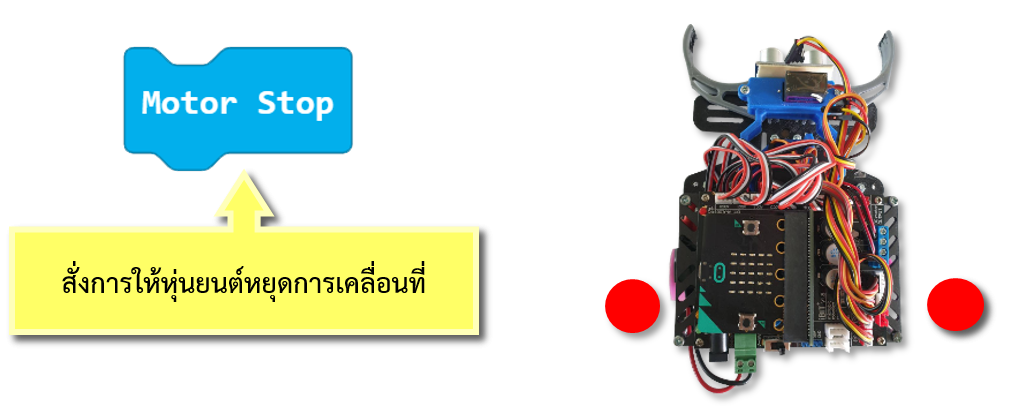
หุ่นยนต์จะสามารถเคลื่อนที่ได้นั้น ต้องอาศัยการทำงานของมอเตอร์ ในการสั่งให้หุ่นยนต์สามารถหมุนซ้ายและหมุนขวา เดินหน้าหรือถอยหลังได้นั้น