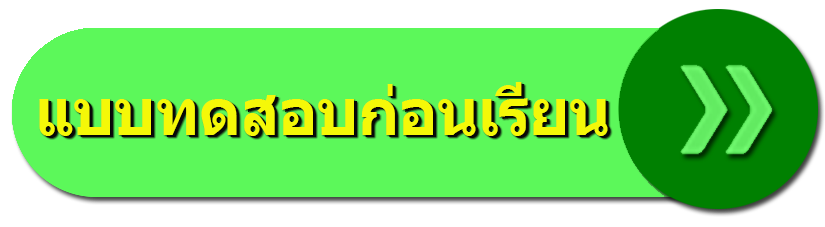
เซอร์โวมอเตอร์ (Servo Motor) เป็นมอเตอร์ที่ควบคุมการทำงานด้วยสัญญาณ Pulse Width Modulation (PWM) สามารถสั่งงาน
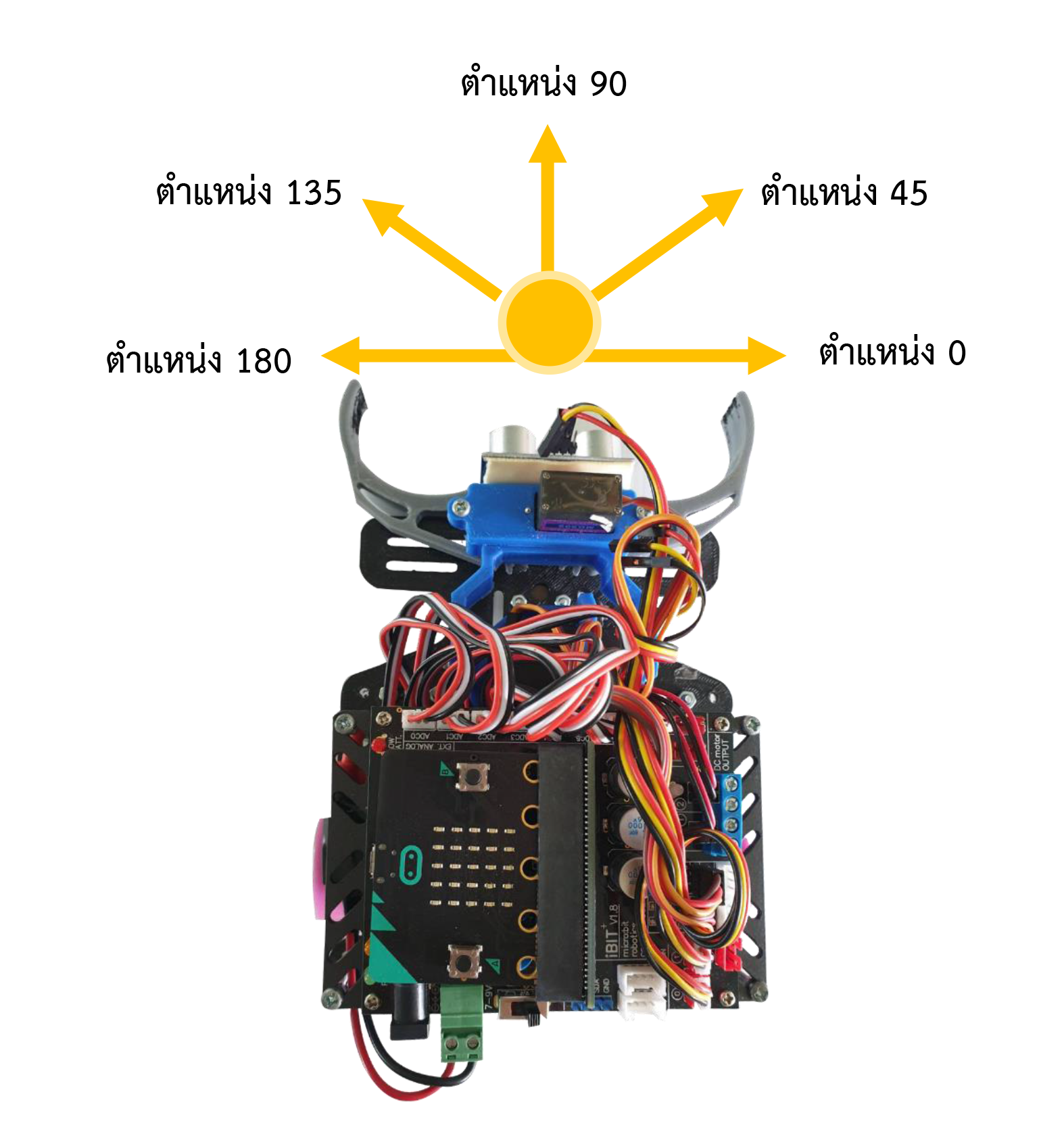
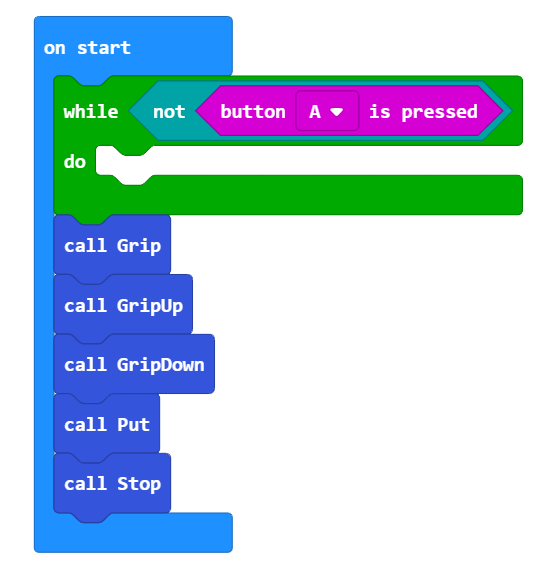
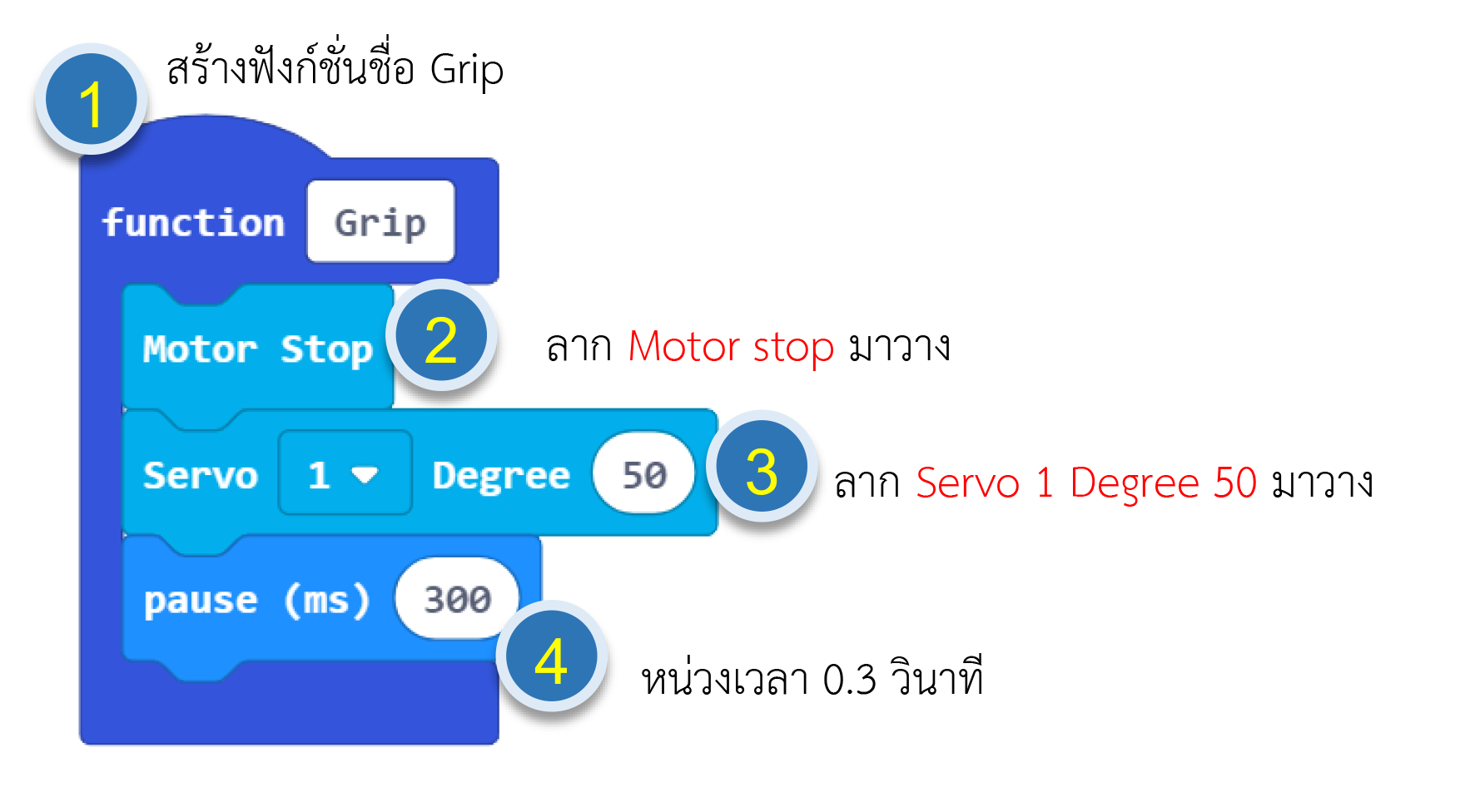
หลัการทำงานของโปรแกรม: เมื่อกดปุ่ม A โปรแกรมจะสั่งให้เซอร์โวช่อง 1 เคลื่อนที่ไปยังตำแหน่ง 50 และหน่วงเวลา 0.3 วินาที เพื่อให้ตัวคีบ
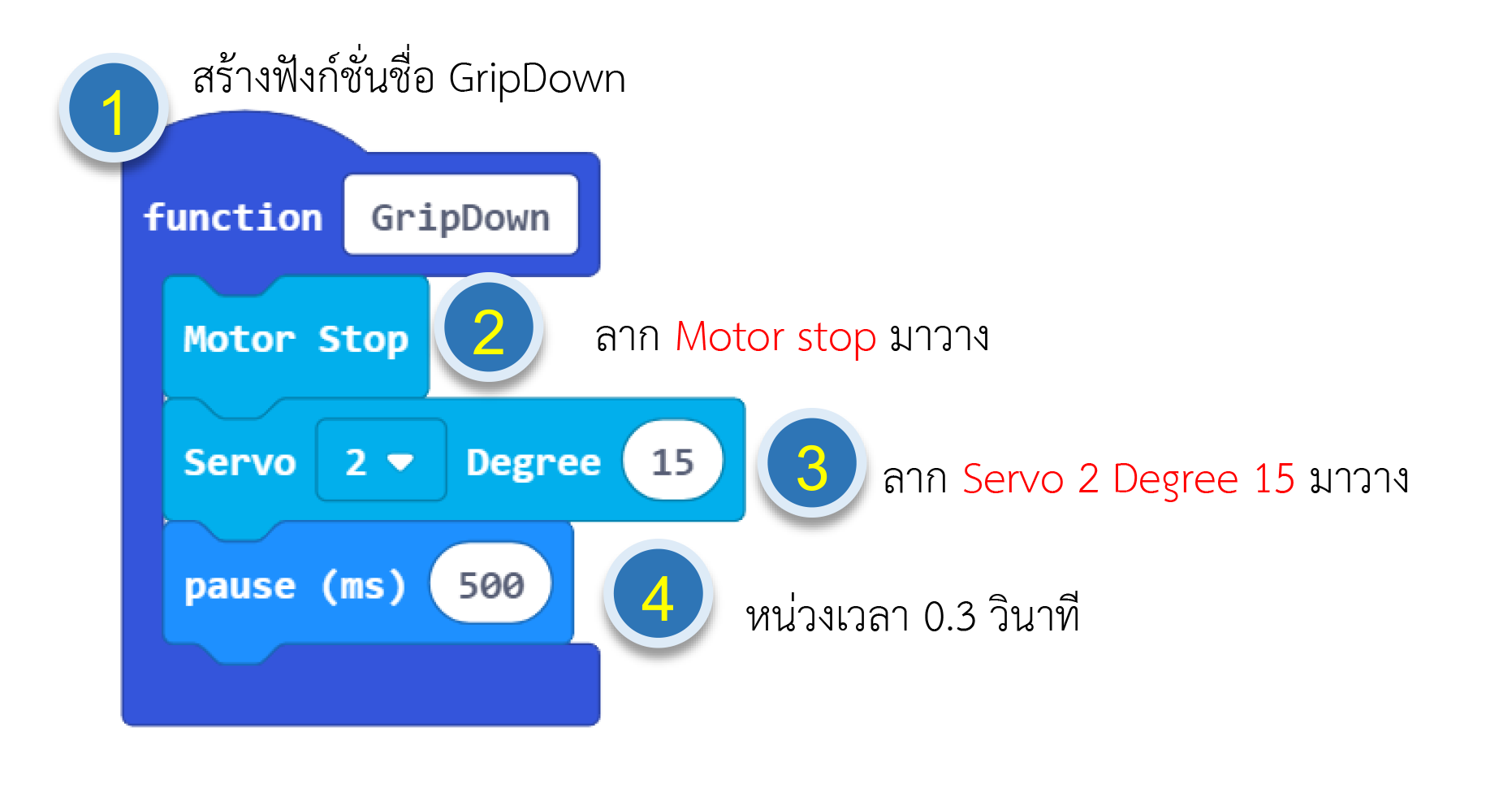
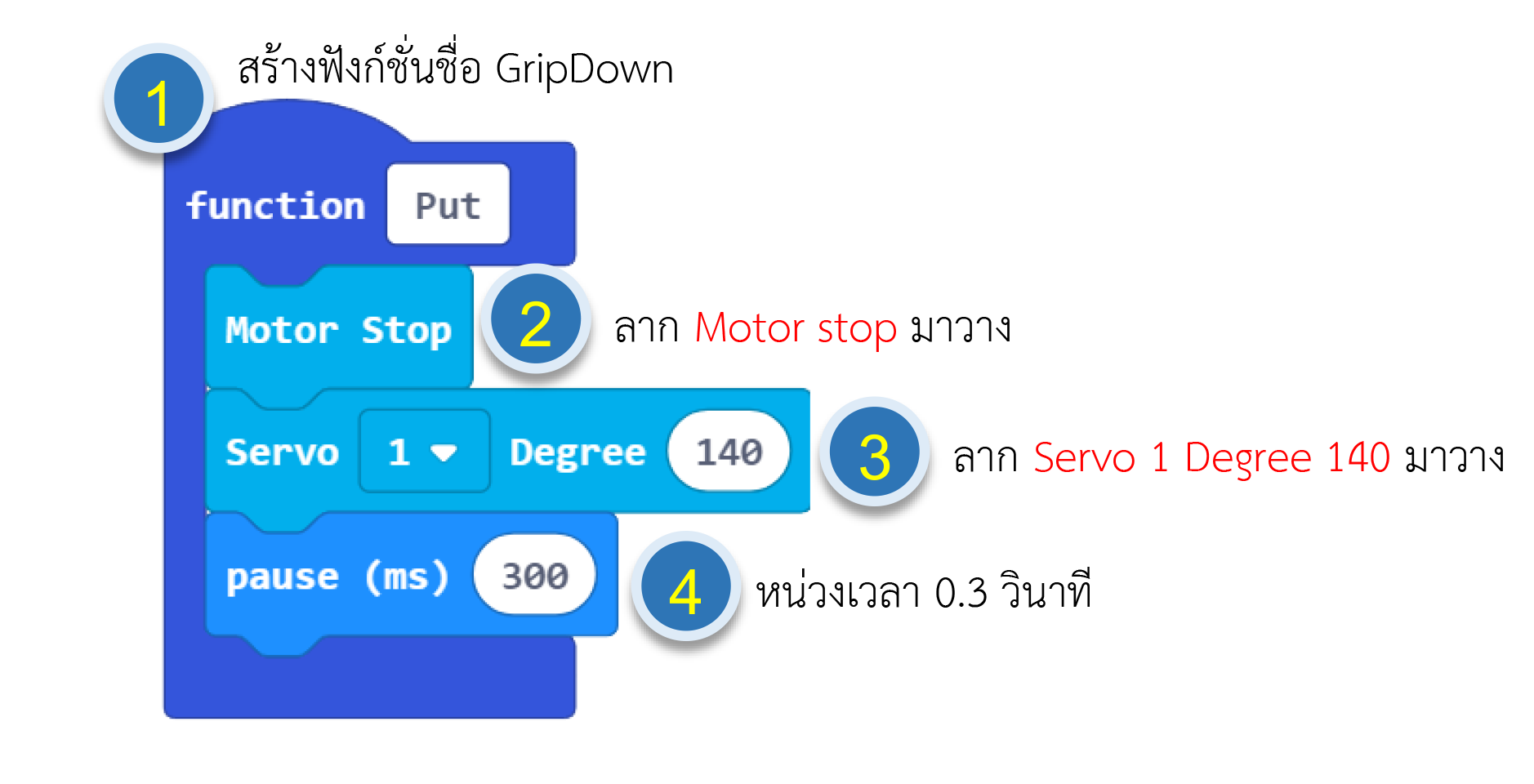
ช่อง 2 ยกตัวคีบลง 15 องศา หน่วงเวลา 0.5 วินาที สุดท้ายเซอร์โวช่อง 1 กางออก 140 องศา และหยุดเวลา 0.3 วินาที สามารถสร้างฟังก์ชั่น