|
| |
|
|
| |
|
|
| |
| บทเรียนที่ 6 คำสั่งหุ่นยนต์ตรวจจับเส้นอย่างง่าย |
| หลักการพื้นฐานของหุ่นยนต์อัตโนมัติที่เคลื่อนที่ตามเส้นสีดำ คือ การควบคุมให้หุ่นยนต์เคลื่อนที่โดยใช้เซนเซอร์ตรวจจับ |
| แสงสะท้อนอินฟราเรดที่ติดตั้งบนหุ่นยนต์ด้านซ้ายและด้านขวาเป็นเซนเซอร์ตรวจจับพื้นสีขาวและเส้นสีดำ ในการควบคุมทิศทาง |
| การเคลื่อนที่ของหุ่นยนต์ IBIT ใช้เซนเซอร์ตรวจจับแสงสะท้อนอินฟราเรด สำหรับตรวจจับเส้นสีดำของสนามที่พื้นสีขาว |
| ค่าแสงสะท้อนของเส้นสีดำ ซึ่งจะได้ค่าแตกต่างกัน โดยสามารถใช้ตัวอย่างโปรแกรมในเนื้อหาบทเรียนที่ 5 เพื่ออ่านค่าแสงสะท้อน |
| และนำมาเขียนคำสั่งขับเคลื่อนหุ่นยนต์เคลื่อนที่ตามเส้นอย่างง่าย ได้ดังนี้ |
|
|
|
| 1. หลักการขับเคลื่อนหุ่นยนต์เคลื่อนที่ตามเส้นอย่างง่าย |
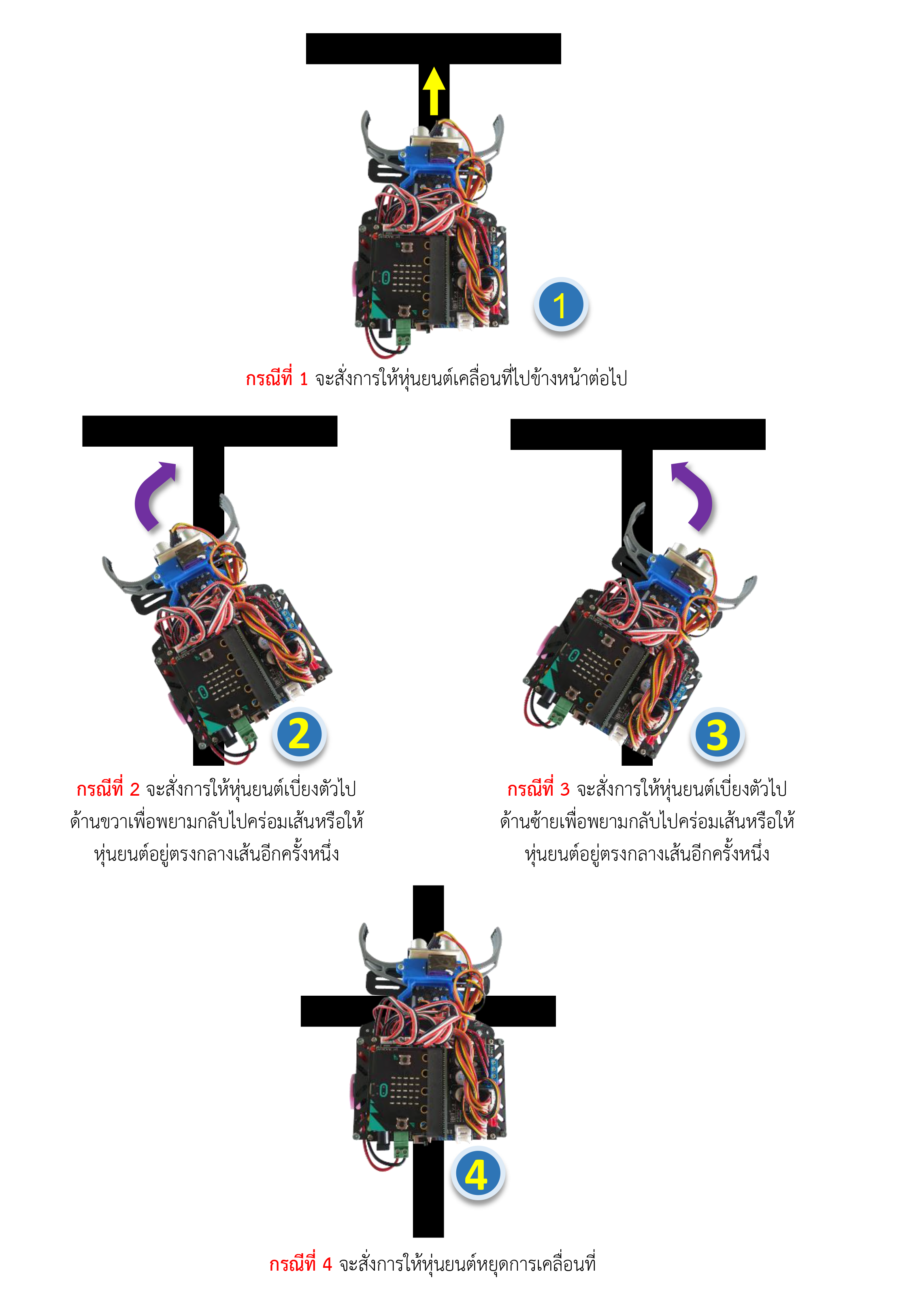
| หลักการเคลื่อนที่ของหุ่นยนต์อย่างง่าย ในกรณีที่เซนเซอร์ด้านซ้ายและด้านขวาพบพื้นที่สีขาว จะสั่งการให้หุ่นยนต์ทำงานดังนี้ |
| กรณีที่ 1 หุ่นยนต์เคลื่อนที่อยู่ในแนวเส้นสีดำ |
| กรณีที่ 2 หุ่นยนต์เคลื่อนที่เบี่ยงไปด้านขวา |
| กรณีที่ 3 หุ่นยนต์เคลื่อนที่เบี่ยงไปด้านซ้าย |
| กรณีที่ 4 หุ่นยนต์เคลื่อนที่พบเส้นตัดสีดำ |
 |
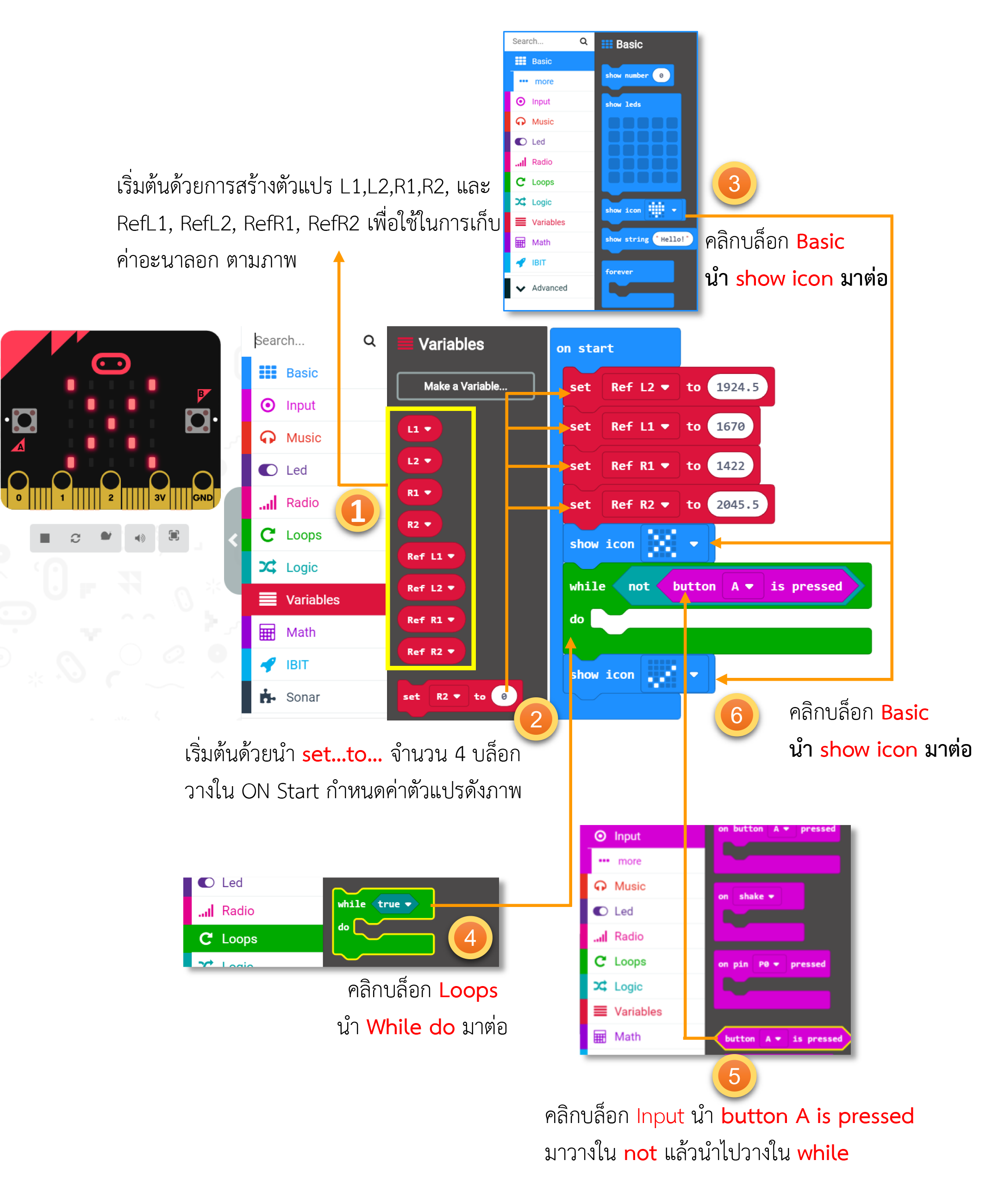
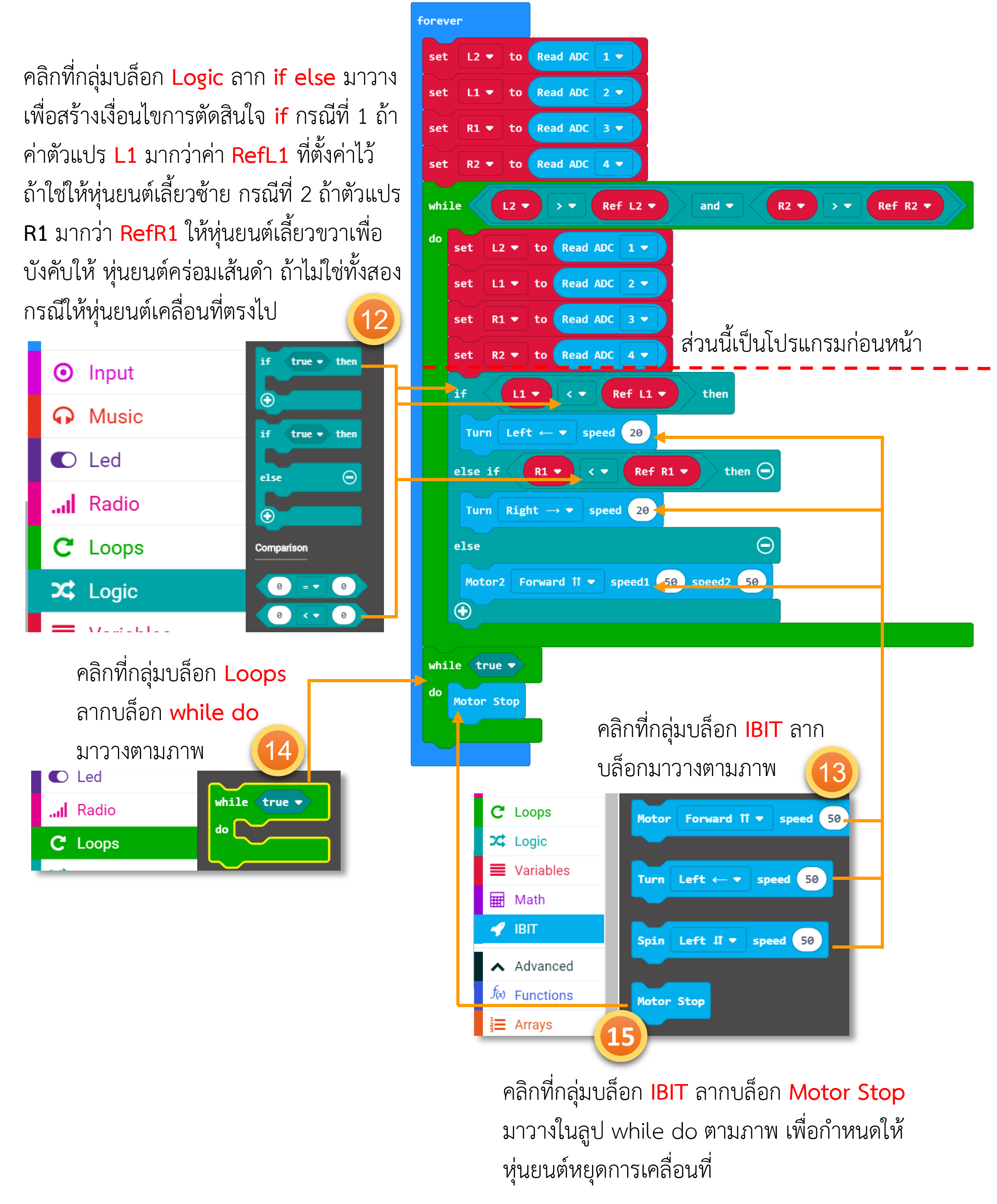
| 2. การเขียนคำสั่งควบคุมหุ่นยนต์ตรวจจับเส้นอย่างง่ายโดยใช้เซนเซอร์ 4 ตัว |
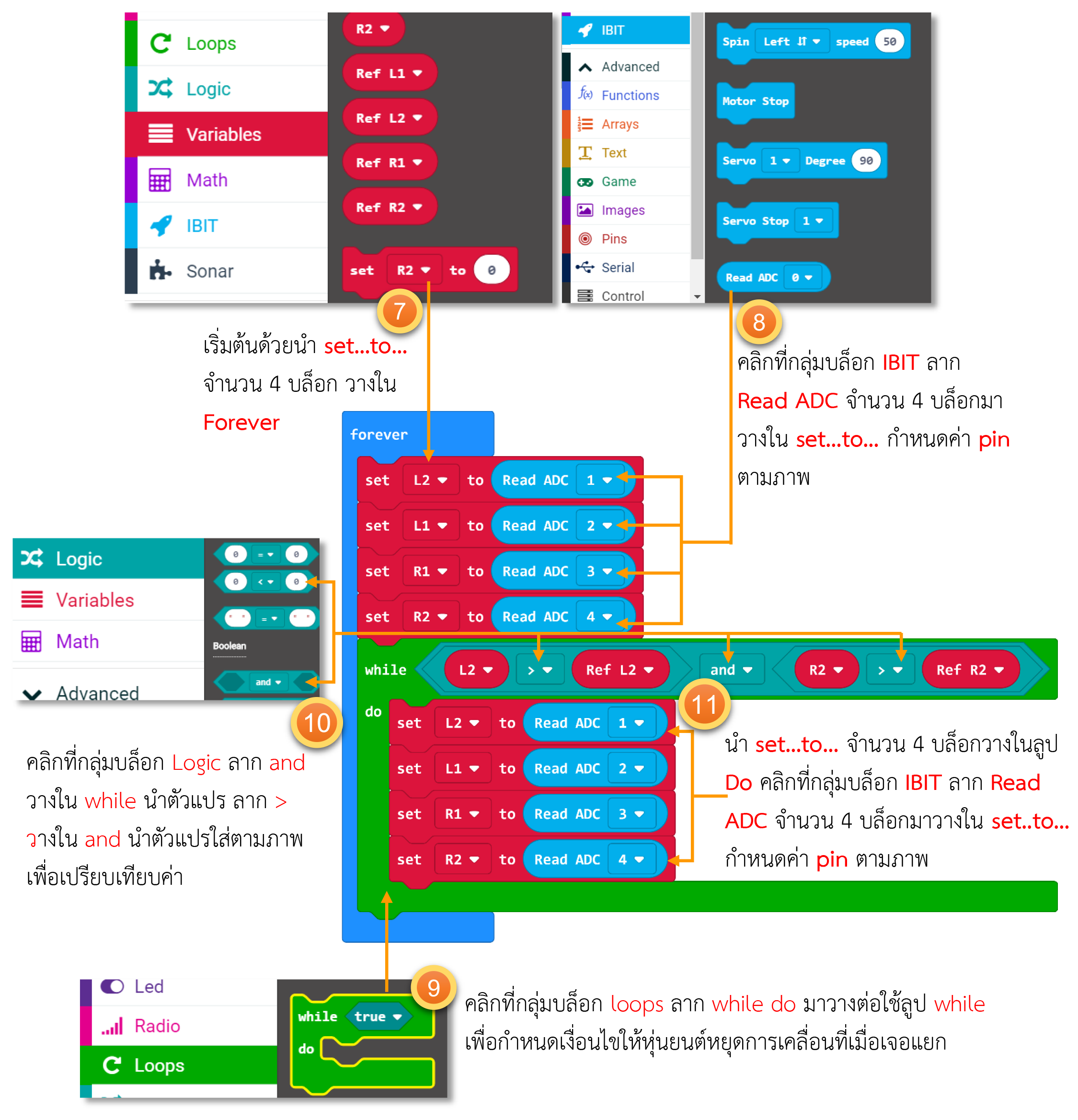
| หลักการทำงานของโปรแกรม หลังจากกดปุ่ม A หุ่นยนต์จะอ่านค่าเซนเซอร์ทางด้านซ้ายและขวามาเรียบเทียบร่วมกันโดย |
| ใช้เงื่อนไข while do วนลูปไปเลื่อยๆ เงื่อนไขในลูป while จะเป็นการตรวจสอบว่าพบเส้นตัดสีดำหรือยังถ้าใช่จะสั่งให้หุ่นยนต์ |
| หยุดการเคลื่อนที่ถ้าเงือนไขเป็นเท็จโปรแกรมจะหลุดออกจากลูป while ไปทำงานต่อในลูป do หุ่นยนต์จะอ่านค่าเซนเซอร์ทาง |
| ด้านซ้ายและขวามาเรียบเทียบร่วมกันโดยใช้เงื่อนไข If 2 กรณีแรกจะพยายามบังคับให้หุ่นยนต์เคลื่อนที่คร่อมเส้นเป็นหลัก |
| ถ้าไม่ใช่ทั้ง 2 กรณี จะส่งให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า โดยสามารถเขียนโปรแกรมควบคุมหุ่ยนต์ตรวจจับเส้นได้ดังนี้ |
 |
 |
 |
 |
|
|
|
|
| |
|
|
|